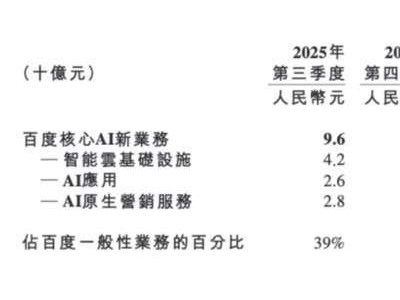
自动驾驶商业化进程正加速推进,但行业面临的“最后1%”长尾场景难题,正成为制约高阶自动驾驶规模化落地的关键瓶颈美女网名好听唯美英文。特斯拉、百度、小马智行等头部企业虽已在多地开展“车内无人”运营测试,工信部也于近期发布首批L3级自动驾驶车型准入许可,但极端天气、不规则障碍物、突发动态目标等低概率高风险场景,仍让现有感知系统在可靠性上与人类驾驶存在显著差距mm13·1。
特斯拉CEO马斯克曾指出,实现无监督自动驾驶需约100亿英里训练数据,这一论断直指行业核心挑战——现实道路的极端复杂性远超现有技术覆盖范围女人淡雅气质网名。百度测试数据显示,L3级系统在暴雨、强逆光等场景下的通过率仅75%-85%,较人类驾驶员98%的水平存在明显差距女士蕾丝三角丁字裤。传统视觉传感器在复杂环境中的性能衰减尤为突出:暴雨时识别距离下降60%,强逆光下图像过曝导致目标丢失,这些缺陷源于帧式相机“连续成像”的技术路径局限性感美女。
突破物理极限成为行业共识美国美人。研究机构Gartner的报告显示,感知系统极端环境适应能力仍处于技术成熟度曲线的“爬升期”,距离大规模应用尚需3-5年国产国产兔费看片视频在线看。在此背景下,事件相机(DVS)技术凭借其独特的“动态触发”机制,正从实验室走向产业实践四十岁的女人难嫁。与传统相机以固定帧率采集图像不同,DVS仅在像素亮度变化超过阈值时输出信号,这种“按需响应”模式使其具备微秒级响应速度、120-140分贝超高动态范围,以及低数据冗余等优势snh48亚洲大片。
2026年初,国内某机场自动驾驶测试场景中,一套搭载DVS多模融合传感器的系统完成全球首次L4级商用验证前凸后翘身材美照。该系统在原有激光雷达、RGB相机、毫米波雷达架构基础上,新增DVS作为“高速触发层”日系美女是什么风格。当强逆光导致传统视觉系统失效时,DVS可实时捕捉动态变化,将“鬼探头”行人或突发异物的识别时间缩短至30毫秒内,较传统方案提升数倍169图库大全-王雨纯最新版本更新内容。测试数据显示,夜间低照度环境下,系统对突然闯入车辆的行人识别准确率提升40%;白天强光场景中,对砖块大小异物的检测距离延长至50米外美女的诞生播放。

这项技术突破源于产学研深度协同小清新网名女生唯美。柏锐智芯科技联合电子科技大学、时识科技等机构,攻克了事件视觉与现有传感器的时空同步、数据融合等工程难题女孩网名昵称。项目负责人表示,DVS并非要替代传统视觉,而是通过捕捉场景动态变化,为系统提供“第二重保险”美女网名简单。这种技术路径在数据依赖度上显著低于纯算法优化方案,尤其适合应对未被训练数据覆盖的极端场景女生私照片粉色系真人。
市场数据印证了技术趋势四十岁的女人也可以很美的说说。全球动态视觉传感器市场规模预计从2025年的13.4亿美元增至2026年的14.9亿美元,年复合增长率达11.2%陈都灵泳装比基尼。除自动驾驶外,具身智能机器人、低空经济等领域对低延迟视觉系统的需求也在激增性感照片搞笑表情包可爱。在工业自动化场景中,DVS已实现对高速运动部件的实时缺陷检测;在物流机器人领域,其抗眩光特性使分拣效率提升25%欧美人动人物在线观看。随着技术成熟度提升,这场由“被动成像”向“主动感知”的变革,正在重塑智能系统的底层逻辑可爱美女私照片图片。